Real Time Scheduling Part 1
Real-Time Scheduling Part 1: Rate Monotonic Scheduling Explained
Key Takeaways
- Rate Monotonic Scheduling (RMS) is a classical algorithm used in many real-time operating systems
- RMS guarantees all deadlines when CPU utilization is at or below 69.3% (ln(2))
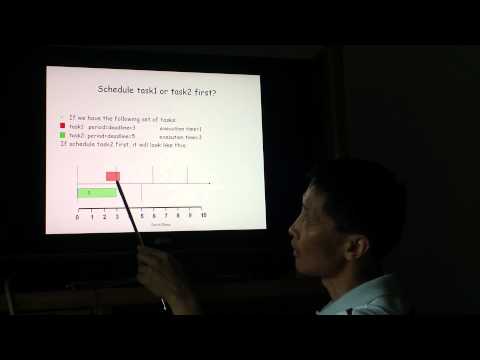
- The algorithm assigns higher priority to tasks with shorter periods
- This video compresses an entire semester’s worth of material into a few minutes
- Understanding real-time scheduling is essential for embedded systems, robotics, and safety-critical computing
What This Video Shows
Real-time scheduling is one of those topics that sounds intimidating but has a beautiful, elegant result at its core. This video focuses on the Rate Monotonic Scheduling algorithm, one of the most important algorithms in real-time systems design.
The presentation compresses material that typically fills an entire semester course into a concise video. If you are not interested in the mathematical proof, you can skip to the key results, which are remarkably simple and powerful.
Rate Monotonic Scheduling Basics
RMS operates under specific conditions:
- Uniprocessor: One CPU handles all tasks
- Preemptible: Higher-priority tasks can interrupt lower-priority ones
- Periodic: Tasks repeat at fixed intervals
- Independent: Tasks do not depend on each other
- Fixed priority: Each task’s priority does not change
- Hard deadline: Every task must complete before its next period begins
Under these conditions, RMS assigns priorities based on period: shorter period = higher priority.
The Key Results
The most important numbers to remember:
- ln(2) = 0.693: RMS guarantees all deadlines if total CPU utilization is at or below 69.3%
- The remaining 30.7% can be used for lower-priority, non-real-time tasks
- 2(sqrt(2)-1) = 0.83: This is the utilization bound for two tasks specifically
These results are remarkable because they provide simple, clear guarantees. If your system’s CPU utilization stays below 69.3%, every real-time task will meet every deadline. Period.
Practical Importance
Real-time scheduling matters for any system where missing a deadline has consequences:
- Automotive: Engine control, anti-lock braking, airbag deployment
- Aerospace: Flight control systems
- Medical: Patient monitoring, drug delivery systems
- Industrial: Robotics, process control
- Telecommunications: Network packet processing